
Tensor Tech CMG-40m Control Moment Gyroscope
Price on request
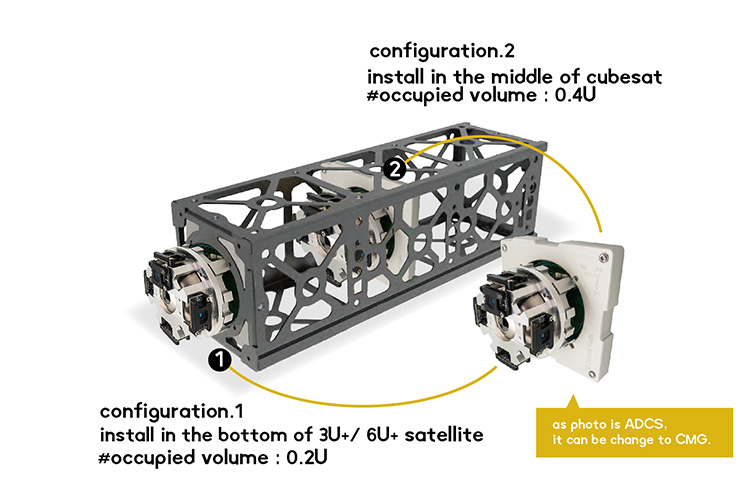
CMG-40m has four variable-speed, single-gimbal Control Moment Gyroscope (CMG) which is suitable for 12U and 16U CubeSats. Unlike traditional CMGs, each driven by two or three motors, this CMG is each driven by only one spherical motor, making it capable of minimizing into a CubeSat form factor. Serving as an attitude actuator component, the CMG-40m has to be commanded by the user’s onboard computer (OBC) or ADCS computer. Torque and speed modes are available for the OBC or ADCS computer to switch between.
The user’s controller design can be simplified by adopting the torque mode. However, the output torque is only accurate when the satellite has a tumbling rate of < 1 deg/second. The speed mode allows the user to manipulate the inner rotor speed and the gimbal angle. It is designed for advanced users who will derive the CMG steering and control laws by themselves.
Description
Features
- Offering improved torque at lower power consumption versus reaction wheels
- Cost-effective solution with high performance
- Compatible with a wide range of satellite configurations
- Comprehensive software support and free technical support
Tensor Tech (Sheet)
Product Properties
| Lead Time |
5 to 8 months |
| Angular Momentum Storage | < 30 mNms for 2-axis;
< 20 mNms for 1-axis (adjustable) |
| Torque | |
| < 3 mNm for 2-axs;
< 2 mNm for 1-axs (adjustable) |
|
| Inner rotor speed control accuracy | |
| < 5 rpm | |
| Tilting angle control accuracy | |
| < 1 deg | |
| Optional | GNSS system and 3-axis magnetorquers |
| Rotor imbalance | ISO 1940 G0.4 |
| Power consumption @ 5V bus | |
| < 4W | |
| Power consumption @ 3.3V bus | |
| < 1W | |
| Mechanical | |
| 4x Tuna-can & 0.4U (< 1000 g) | |
| Interface | |
| I²C, UART and RS485/422 *(optional) |
*The user can only select one of the two.


